



0

於
2019/03/12 16:44:49
發文

0
U-CAR要不要驗證一下結果到底值不值得信賴?
0
於
2019/03/14 17:24:28
發文
於
2019/03/14 17:24:53
發文IP 110.50.*.*
https://forum.u-car.com.tw/forum/thread/314653/UCAR%E7%B6%B2%E5%8F%8B%E7%8D%A8%E5%AE%B6%E6%B4%BB%E5%8B%95%E7%AC%AC%E5%9B%9B%E4%BB%A3FordFocusARTC%E9%A7%95%E9%A6%AD%E9%AB%94%E9%A9%97%E6%B4%BB%E5%8B%95

0
AWD 或 前驅 應該也有差異

0
於
2019/03/17 16:29:12
發文
於
2019/03/17 16:32:57
發文IP 123.195.*.*
回應 dcch6666(DC)所寫
AWD 或 前驅 應該也有差異
當汽車在過彎時:
如果 後驅車的後輪驅動力越大
→ 後輪輪胎的 slip angle (側滑角) 越大
→ over-steer (轉向過度) 的程度就越大;
反之,
如果 前驅車的前輪驅動力越大
→ 前輪輪胎的 slip angle (側滑角) 越大
→ under-steer (轉向不足) 的程度就越大。
例如,
前驅車在過彎時,因為 100% 的驅動力都在前輪,
所以「轉向不足」的程度就比較大;
反觀
處於 AWD 車在過彎時,約有 40~50% 的驅動力被傳至後輪
→ 前輪的驅動力剩下 50~60%
→「轉向不足」的程度就變小了 ...
但是,
但是,
以上所言,都與「麋鹿測試」無關 --
因為在「麋鹿測試」過程中根本「不踩油門」!如下:
https://zh.wikipedia.org/wiki/%E9%BA%8B%E9%B9%BF%E6%B5%8B%E8%AF%95
「麋鹿測試」的測試過程:
「... 在駕車進入測試路段時,測試員
應在『不踩剎車和油門』的情況下迅速變線至逆行道以躲避障礙 ...」
也就是說,
影響「麋鹿測試」成績的主要因素就是
「重心高度」「輪胎 & 懸吊設計」「ESP 的性能」,
而與 驅動方式 (2WD/AWD) 沒啥大關係 ... 😉
回應 dcch6666(DC)所寫
AWD 或 前驅 應該也有差異
當汽車在過彎時:
如果 後驅車的後輪驅動力越大
→ 後輪輪胎的 slip angle (側滑角) 越大
→ over-steer (轉向過度) 的程度就越大;
反之,
如果 前驅車的前輪驅動力越大
→ 前輪輪胎的 slip angle (側滑角) 越大
→ under-steer (轉向不足) 的程度就越大。
因此,
前驅車在過彎時,因為 100% 的驅動力都在前輪,
所以「轉向不足」的程度就比較大;
反觀
AWD 車在過彎時,約有 40~50% 的驅動力被傳至後輪
→ 前輪的驅動力剩下 50~60%
→「轉向不足」的程度就變小了 ...
但是,
但是,
以上所言,都與「麋鹿測試」無關 --
因為在「麋鹿測試」過程中根本「不踩油門」!如下:
https://zh.wikipedia.org/wiki/%E9%BA%8B%E9%B9%BF%E6%B5%8B%E8%AF%95
「麋鹿測試」的測試過程:
「... 在駕車進入測試路段時,測試員
應在『不踩剎車和油門』的情況下迅速變線至逆行道以躲避障礙 ...」
也就是說,
影響「麋鹿測試」成績的主要因素就是
「重心高度」「輪胎 & 懸吊設計」「ESP 的性能」,
而與 驅動方式 (2WD/AWD) 沒啥大關係 ... 😉
😊
0
於
2019/03/17 17:11:44
發文
紀錄保持者: Citroën Xantia 3.0i V6 Activa1999 85 km/h
https://oppositelock.kinja.com/moose-tests-ranked-1681602389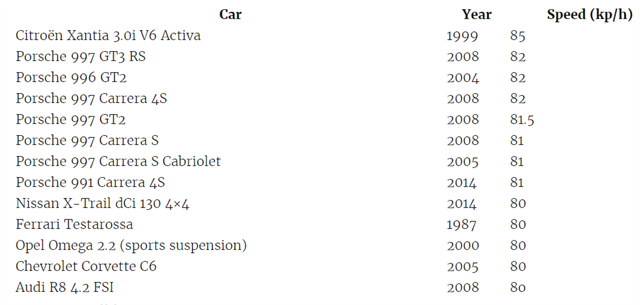

於
2019/03/12 22:38:09
發文IP 110.50.*.*
參考 km77.com,列出 >=80Km/h 的車型,雖然麋鹿測試(moose test)不是萬能,但初代A Class曾經為了測試不理想而改善懸吊系統喔!!!
2017 Audi Q5 pass @ 82Km/h
2017 Nissan X-Trail pass @ 80Km/h
2017 Peugeot 3008 pass @ 80Km/h
2018 Mitsubishi Eclipse Cross pass @ 80Km/h
在youtube.com 打入 "車型 moose test"就可以找到,FYI !
ISO 3888-2:2011 defines the dimensions of the test track for a closed-loop, severe lane-change manoeuvre test for subjectively determining the obstacle avoidance performance of a vehicle, one specific part of vehicle dynamics and road-holding ability. It is applicable to passenger cars as defined in ISO 3833 and light commercial vehicles up to a gross vehicle mass of 3,5 t.
參考 km77.com,列出 >=80Km/h 的車型,雖然麋鹿測試(moose test)不是萬能,但初代A Class曾經為了測試不理想而改善懸吊系統喔!!!
2017 Audi Q5 pass @ 82Km/h
2017 Nissan X-Trail pass @ 80Km/h
2017 Peugeot 3008 pass @ 80Km/h
2018 Mitsubishi Eclipse Cross pass @ 80Km/h
在youtube.com 打入 "車型 moose test"就可以找到,FYI !