
由行政院經濟部推動成立的 ARTC(全名為 Automotive Research & Testing Center,中文名稱為財團法人車輛研究測試中心,簡稱車輛中心),除了提供車廠研發與測試所需的場域及能量,也不斷致力於扶植國內自駕車發展的研發工程。
先前好幾次,U-CAR 也曾實際參訪體驗 ARTC 到目前為止的自動駕駛車輛研發成果,包含以高爾夫球車改裝的自駕車在園區內接駁,以及將 Luxgen U6 改裝自駕車的測試擴展到實際道路行駛。

而在 2019 年 2 月 14 日西洋情人節,ARTC 除了再次實際展演高爾夫球車 e-golf 自駕車與 Luxgen U6 自駕車之外(詳情體驗報導可回顧:ARTC 車輛中心開發之自動駕駛車輛成果展示與實際體驗),同時還介紹了要開發自駕車非常重要的幾個技術,包含「CNN 辨識系統、AEB 實車驗證技術、駕駛模擬驗證系統」等等。

首先在 CNN 辨識技術,也就是要讓車輛能夠辨識攝影機所照射到的物體,進而讓電腦能做出判斷。這屬於在 SAE 規範的 Level 0-深度學習技術,主要是車輛能夠達到警示功能,即屬於 Level 0:
- 重要技術項目:
- 1.運用卷積神經網路(Convolution Neural Networks,CNNs)技術建立前方標的物辨識與追蹤技術。
- 2.利用攝影機辨別行人、機/腳踏車、車輛、紅綠燈與提示型號誌。
- 技術特色:
- 1.ARTC 訓練後的模型經過模型轉譯也可以於嵌入式平台運行。
- 2.以 CNN 演算法為基礎,建立台灣道路環境(市區/一般道路/高速公路)之網路模型,針對一般道路紅綠燈情境可以進一步辨識其燈號資訊。
- 3.透過 CNN 神經網路之卷積層、池化層、全連階層等組合,擷取影像特徵訓練並建立模型。

接著在 AEB 實車驗證技術,先前 U-CAR 也針對 AEB 進行了「專題系列報導」,同時也前往 ARTC 實際參訪其目前具備的驗證技術能量,而 2 月 14 日 ARTC 再次展演 AEB 的檢測能量,一大用意就是要傳達,車輛要達到 Level 1、Level 2,其感知融合與控制就相當重要,能讓車輛至少做到加減速的控制。因此需要透過 AEB 實驗測試,來驗證車輛的自動煞車功能無虞。
- 重點技術項目:
- 1.多障礙物偵測技術影像與雷達感知融合模組
- 2.平行式影像與雷達感知融合模組
- 技術特色:
- 1.開發前期依循 CMMI 流程進行系統規劃、設計及驗證,並透過 Prescan 駕駛模擬系統建立標準測試情境進行由感測端到系統端的模擬設計與測試。
- 2.離線通過模擬驗證後導入實車驗證,使用 EuroNCAP 認證的標準假人與假車,配合駕駛機器人控制油門、轉向與剎車,遵循 EuroNCAP AEB 之規範進行驗證測試。
- 3.控制處理器通過 ISO26262 ASIL C 之流程認證。

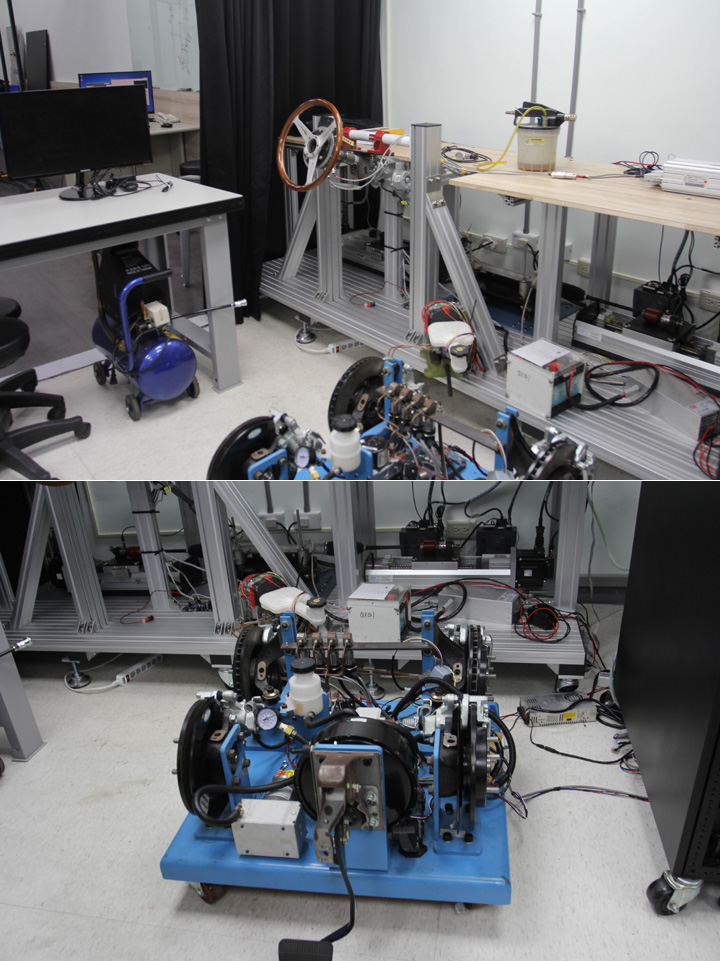
最後 ARTC 開放能表現出真實路況的六軸動態模擬系統,看似有如一套電玩設備,實際上是要用來測試相關感知器與系統於各階段之模組,藉由虛擬環境來仿效大部分的各種真實道路路況,由於車廠若要實際到世界各地蒐集測試各種狀況來驗證設備,既耗費金錢與時間,還不一定都能完整測試,因此透過六軸動態模擬系統,有效驗證系統各模組功能並降低測試成本、時間與風險。

這套駕駛模擬驗證,可不僅僅只是一個模擬完整的駕駛座艙,看著大螢幕在虛擬環境中開車而已,其座艙會連接到一旁的真正設備,包含有煞車、方向盤、攝影機等等,依照車廠的需求調整其自駕技術所配合的機構狀態,再陸續於虛擬環境中,設置交通環境、模擬光、影、氣候、地形等變化,還有其他車輛、行人和障礙物來建立驗證場景。這套自動駕駛模擬座艙,提供 Level 0~5 的駕駛模擬驗證。

最後 Level 3、Level 4 自駕車所需滿足的服務情境,便是在一開始提到的 e-golf、Luxgen U6 自駕車上測試與實現。 ARTC 另外預告之後將結合國內車體廠、與相關技術單位打造 E-Auto Shuttle 的 15 人自駕巴士,供開放場域/固定路線接駁,預計將在 2019 年 6 月完成自動駕駛功能整合。
而即將於 2 月 25 日開幕的臺南沙崙自駕場域,可提供 13 種情境模擬測試,將由 ARTC 主要負責經營,U-CAR 屆時也會前往現場帶大家了解,敬請網友持續鎖定。





討論區
成為第一個發表的人