
還記得 2016 年 5 月 15 日,由行政院經濟部推動成立的 ARTC(全名為 Automotive Research & Testing Center,中文名稱為財團法人車輛研究測試中心,簡稱車輛中心)以 Luxgen 改裝的自駕車,在長 600 公尺的路段,測試項目包含車道變換避障、道路縮減、轉彎、直線加速、禮讓行人自動緊急煞車及全自動停車。
時隔 1 年多,2017 年 12 月 7 日,ARTC 舉辦了新的自駕車成果展示,不僅以高爾夫球車改裝的自駕車在園區內接駁,同時更將 Luxgen U6 改裝自駕車的測試擴展到實際道路,且開放給媒體朋友進行體驗。

ARTC 發展自駕車之願景與目標
如果有長期關注 U-CAR 報導 ARTC 改裝測試自駕車的新聞,就知道不論是 Luxgen 車輛改裝而成的自駕車,或者是自動駕駛遊園車 e-golf,早已不是第 1 次亮相的作品。前者於 2014 年 9 月 12 日於台北科技大學首次發表自動駕駛技術,後者也在 2017 年 4 月 19 日的 Taipei AMPA 展上,於南港展覽館實地進行簡單的示範與開放體驗。

不過 ARTC 針對自駕車的開發依舊持續測試、精進。ARTC 的廖慶秋副總表示,為了展現自動駕駛遊園車 e-golf 的價值,因此目前也已經在 ARTC 的園區內設計了遊園路線,除了進行測試之外,也能夠讓訪客乘坐遊園車,只要透過 APP 下載操作即可。
至於 Luxgen 自駕車的部分,則是已經發展到能夠應對彰濱工業區的道路路況,接下來就等政府一旦法規開放實際道路測試,ARTC 便會立即申請,近期目標希望能在 2018 年於彰濱工業區實施接駁測試的服務,讓民眾能搭乘自駕車遊覽,並逐步往更遠的路線發展。

ARTC 表示,目前開發的自動駕駛遊園車 e-golf,改裝費用大約 40、50 萬元左右,而透過較為低成本的技術應用測試,希望能達到不輸高端定位儀器、感測設備的效果,同時讓國內任何風景區或遊樂園等等,都有辦法負擔的起,進而普及自動駕駛電動車,為大眾所接受。
另外,ARTC 自 2007 年起即投入先進駕駛輔助系統 ADAS 的研發,至今已成功對國內 16 家廠商 11 項 ADAS 的智慧關鍵技術轉移,將研發成果落實技術移轉與產業商品化,因此 Luxgen 改裝的自駕車,目標也是希望能成功的技術移轉與商品化,讓國內自動駕駛技術能與世界接軌。

本次園區接駁自駕車與一般道路自駕車差異表

首先看到 Luxgen U6 改裝的自駕車,從外觀上可以看到的感測器包含有車頂上的 3D 光達障礙物偵測系統+GPS 定位、車頭保險桿內(車牌位置上方)的雷達感測障礙物,以及前擋風玻璃架設攝影機進行障礙物辨識。其餘內部還有人機介面的安裝,配合車輛動態決策控制系統、以及轉向、油門、煞車的改裝,讓自駕系統得以控制車輛。

至於自動駕駛遊園車 e-golf,與 U6 改裝自駕車使用的儀器大同小異,在車頂前方也有 3D 光達障礙物偵測系統以及攝影機,不過並未有安裝雷達偵測。
另外補充說明,本次的 e-golf 與 2017 Taipei AMPA 展較為不同的地方在於,當時展出僅使用車輛協同式定位系統,主要透過圖資輸入電腦,加上慣性量測元件、輪速計、攝影機、光達等等的應用,讓 GPS 抓取車輛定位能夠藉由判讀與圖資裡的各種固定標的物(舉例如:紅綠燈、電線杆)之距離差,找到車輛的正確位置。
不過此次還另外加裝了 RTK Sensor(RTK 即為 Real-time kinematic,即時動態定位)在車頂上,ARTC 表示用意只是為了幫助測試蒐集更多數據,不過無論安裝與否,車輛的定位誤差值都可控制在 15~20 公分。

自動駕駛遊園車 e-golf 園區體驗
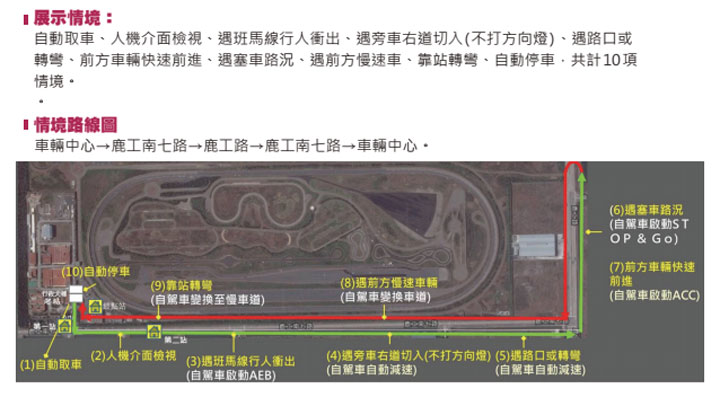
本次自動駕駛遊園車 e-golf,時速設定最高達 12 公里,而展演的情境狀況與路線如下:

首先筆者進行自動駕駛遊園車 e-golf 的園區接駁體驗,透過手機 App,可以看到車輛位置在何處,若進行操作叫車,則車輛便會自行停靠至該站點。在停靠站點的時候,筆者發現每次停靠不一定會非常貼近人行道,ARTC 人員表示,由於停靠站的位置是以 GPS 偵測「一塊區域」而非「一個定點」,只要車輛進入該設定的區域便視為順利進站,因此每次離人行道的距離不一,屬於合理的誤差值範圍內。
而當所有乘客的上下車完成,在車輛上的人機介面便可自行勾選要停靠的站點,案下 GO 按鍵即會自動出發。

接著在體驗過程中的情境,包含有機車闖入、前方有慢速車、自行車進入以及行人穿越,在這些過程中,e-golf 都順利停下,而且保持的安全距離依照偵測物體的不同而有所差異,當偵測到前方慢速汽車時,保持的車距至少都有 1 輛車以上的間隔,行人或腳踏車大多也都有 3~5 公尺的距離。

筆者特別詢問 ARTC,如果發生車輛沒有自行煞停時,有無任何緊急措施?ARTC 則回應,系統這時可以切換為人員介入,讓人員可以控制緊急煞車。所以這也是為何遊園車速度可以達 15~20 公里,但目前設定自動駕駛時速僅達 12 公里的緣故,遇到緊急狀況才來得及應變。
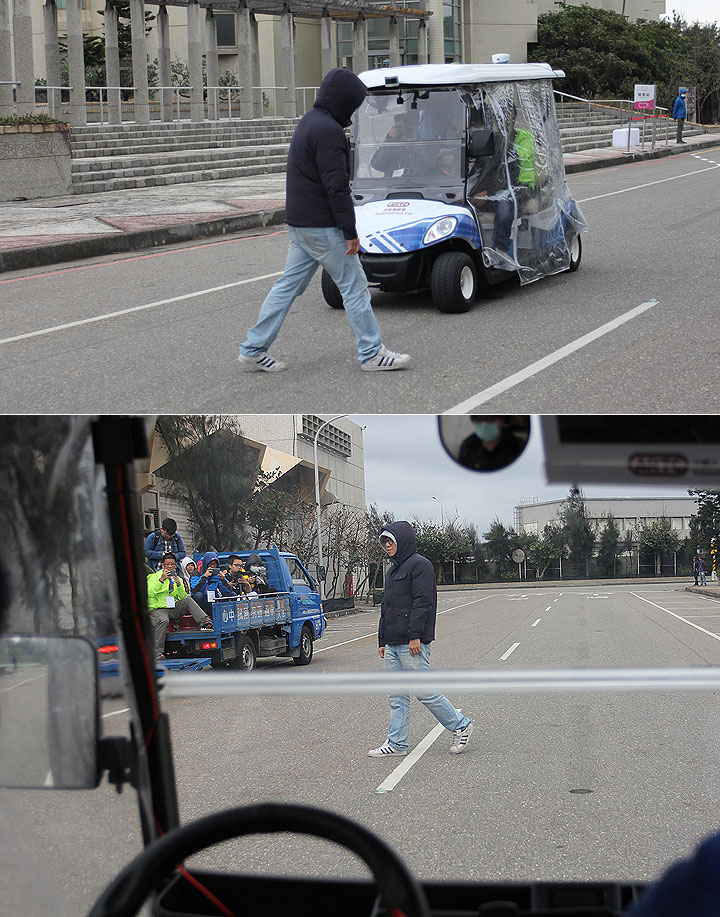
Luxgen U6 改裝自駕車一般道路體驗
接著是 Luxgen U6 改裝自駕車,自駕時速設定最高達 40 公里,而展演的情境狀況與路線如下:
一開始同樣透過手機 App 進行車輛呼叫,這時車輛便自動開至路線已經設定好的停靠點,供大家進行上車。

自動駕駛車輛全程行進的過程中,駕駛座的人員完全沒有控制方向盤或油門煞車踏板,全權由電腦進行操控,而為了安全起見,ARTC 設定車輛的轉彎時速大約在 10 公里左右。
面對車輛從外側車道切入內側,自駕車順利進行煞車,同時發揮 ACC 的功能自動控制車距進行定速巡航,遇到模擬塞車路況,也能夠順利停止再起步。不過目前 3D 光達障礙物偵測系統只能架設於車頂,偵測車頭的障礙物仍存有一些死角,因此舉例如果遇到一些小動物,可能會因此無法偵測到,這也是 ARTC 將再研究改進的項目之一。

最後的一大展演重點,則是變換車道進行超車的動作,自駕車也順利完成。在此特別說明的是,由於車速設定最高只到 40 公里,因此即使車輛超車,車速也沒超過設定的速限。
原則上整趟的展演皆順利完成,不過在體驗過程中,可以發現車輛的煞車順暢度並不好,不若許多國外自駕車的煞車那般線性。
經過向 ARTC 李玉忠經理請教,表示 Luxgen U6 自動駕駛的油門與煞車控制,都是 ARTC 自行改裝,而 U6 原本的煞車系統是由國外廠商開發,但是當華創車電要向國外取得整套煞車系統的設計資料,需要相當昂貴的價碼才能夠索取,這也使得 ARTC 沒辦法讓自駕系統與原始的煞車系統進行結合,只能先以 ABS、ESC 系統下去改裝結合,先求能順利煞停,未來再思索如何開發更順暢的煞車感受。

最後的一大展演重點,則是變換車道進行超車的動作,自駕車也順利完成。在此特別說明的是,由於車速設定最高只到 40 公里,因此即使車輛超車,車速也沒超過設定的速限。
這其實也突顯國內產業的一個問題,若要開發自動駕駛系統,絕對需要結合車輛的油門、煞車、轉向系統等配合,才能順利實現在車輛上,偏偏這些統技術幾乎掌握在國外的大廠如 Bosch 等等,若要向國外購買,所需的成本又過於龐大。
所以本次來說,ARTC 礙於無法取得煞車系統的原始資料,只能重頭對自動駕駛所需的煞車系統進行研究與改裝。ARTC 也期望,國內能夠有廠商透入系統端的開發,這也是攸關於國內自動駕駛系統開發,能否快速追上全球各個汽車大廠的關鍵因素之一。




討論區
成為第一個發表的人