
有鑑於國際間各大車廠、研究機構近年來紛紛投入「自動駕駛」技術的研發,並且擘劃出「自駕車」世界的未來願景,相關技術的發展與成熟度便備受各界關注。
因此,U-CAR 除先前針對 Tesla 自動駕駛事故後,以專題探討自動駕駛議題外,近日更獲國內財團法人車輛測試研究中心 ARTC 之邀,於彰濱工業區總部,見證 ARTC 與國內相關廠商,共同研發搭載 ADAS(Advanced Driver Assist Systems)先進輔助駕駛技術的自動駕駛實車、以及其他共計五大科技研究之成果,預計這些「Made in Taiwan」的相關技術,可望於 2017 年上路實測。

ARTC 發表多項 ADAS 系統,展現國人研發實力
財團法人車輛測試研究中心 ARTC 總經理黃隆洲指出,此次發表的多項 ADAS 系統,包含「自動輔助駕駛」、「自動緊急煞車系統驗證技術」、「停車場域自動輔助駕駛系統」、「行人辨識系統」、「無線充電系統」及「車載網路管理」等五大項研究成果,是國內 14 家廠商與 ARTC 共同合作的心血結晶。也期望透過相關技術的展現,證明國人的研發技術不亞於 Google 等國際大廠。
| ADAS 產品技術名稱 | 成功技術轉移並商品化廠商 |
| AVM 全週影像系統 | 同致電子、帷享科技 |
| MOD 影像式障礙物系統 | 同致電子 |
| BSD 盲點警示系統 | 帷享科技、輝創電子、健生公司 |
| FCW & LDW 前方安全警示系統 | 聯詠電子、威普科技、輝創電子、慧展科技、 創研光電、同致電子 |
| PAS 倒車動態軌跡系統 | 健生公司、帷享科技、池盈科技、輝創電子 |
| DSM 駕駛人監控系統 | 由田新技、凱銳光電、慧展科技 |
| APGS 自動停車系統 | 新上富公司、帷享科技、輝創電子 |
| AEB 自動緊急煞車系統 | 慧展科技 |
| EPS 電動輔助轉向系統 | 中華汽車、旭春公司 |
- ARTC 五大科研成果
- 一、自動輔助駕駛系統
- 二、自動緊急煞車系統驗證技術
- 三、行人辨識系統
- 四、停車場域自動輔助駕駛系統
- 五、無線充電系統及車載網路管理
一、自動輔助駕駛系統
活動當天筆者抵達 ARTC 總部後,即先於高速周回道體驗 ADAS 系統之自動輔助駕駛功能。因為 ARTC 表示,交通事故當中,有高達 90%是人為因素造成,起因於人類在長途駕駛會因過度疲勞而分心,無法百分之百注意周遭的路況與環境,造成車輛偏移車道、碰撞前方車輛等情況。

為減少相關事故的發生,除國外車廠有研發相關輔助駕駛系統外,國內 ARTC 車輛中心也開發 AEB 自動緊急煞車(Autonomous Emergency Braking System)及 LFS 車道跟隨系統(Lane Following System),讓車輛在道路行駛中,無論直線、轉彎皆能自行維持在車道內,當遇到其他車輛或行人等障礙物出現時,系統也將主動介入控制煞車。

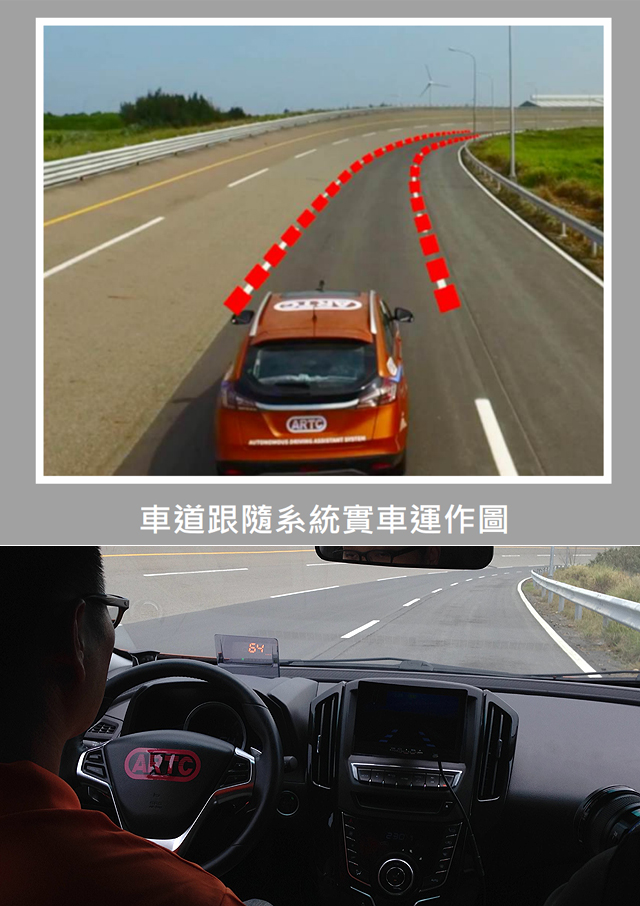
根據筆者當天的體驗,ARTC 備有一輛以 Luxgen U6 為基礎的自動輔助駕駛實車,在高速周回道進行系統的實際展演。而在 LFS 車道跟隨系統的幫助下,實車在時速 0 到 120 公里的區間內,既使遇到周回道較大的彎道處,人員沒有介入方向盤的操縱、僅負責油門的踩踏,車輛透過 LFS 車道跟隨系統,搭配影像偵測模組、以及 EPS 電動輔助轉向系統,感測模組偵測前方車道線及車輛位置偏移資訊後,一樣會跟隨車道線進行微調、轉向,整體感受相當平順。
完成高速周回道之 LFS 車道跟隨系統體驗,在回到出發點前時,ARTC 人員將時速控制在 60 公里上下,並同時開啟 LFS 車道跟隨系統與 AEB 自動緊急煞車,讓車輛維持在車道內、慢慢追上前方與 Euro NCAP 同樣之「活動式追擊車」。

而當毫米波雷達偵測到兩車間距縮短至 100~5 公尺的區間,AEB 自動緊急煞車便開始以較大的力道做動,力道之大讓筆者感受到安全帶的緊縮,車輛煞停至一定速度後(約時速 10 公里左右),系統即會將車輛主控權返還予駕駛者操作。

二、自動緊急煞車系統驗證技術
Euro NCAP 歐洲新車安全協會自 2013 年底,導入 AEB 自動緊急煞車系統後,近期更新增動態行人防撞系統測試納入評分標準。因此 ARTC 也與國際接軌,導入與 Euro NCAP 同樣的自動緊急煞車系統驗證技術,可實施行人防撞偵測功能測試(AEB Pedestrian)、AEB NCAP 主動安全系統驗證(AEB City & AEB Inter-Urban)等測試,以期未來能針對國內販售車輛,進行相同水準的測試。
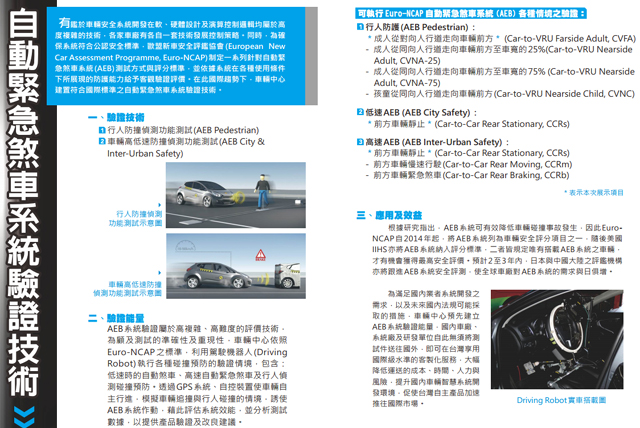
編按,經 ARTC 告知,將自動緊急煞車系統驗證技術展示細節予以省略。
三、行人辨識系統
除了以 Driving Robot 與腳部活動式假人等裝置,展現國內 ARTC 與歐盟 Euro NCAP 具備相同規格的驗證技術後。因 Euro NCAP 已將自動緊急煞車之行人偵測功能,列為 2017 年的評分項目之一,ARTC 也在另外的場域,展出 ARTC 與國內廠商共同開發之「行人辨識系統」,使用「單一視覺感測器」模組進行行人辨識,並包含動態偵測範圍技術與行人辨識技術,以證明具備不亞於國際大廠的研發實力。

ARTC 說明,視覺感測器的優點,除給予駕駛者具視覺化的顯示效果,也透過影像解析,來取得障礙物在影像上的特性或特徵,搭配不同視覺感測器之鏡頭與感測元件,可在時速 30 公里、照度達 50Lux 以上的影像環境下,辨識出 5~25 公尺內的行人,再運用影像辨識,判斷車輛與行人的距離後進行煞停。
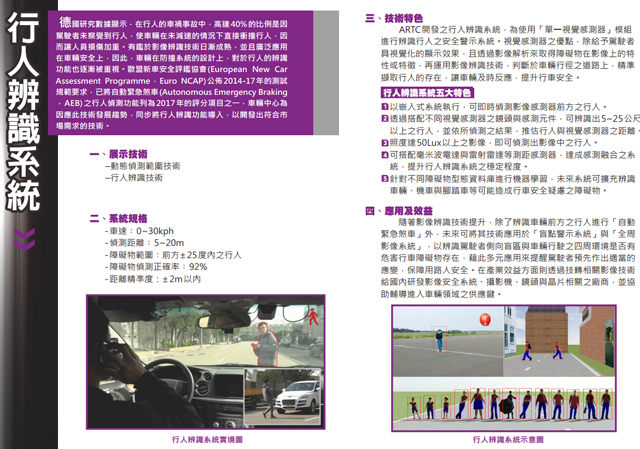
除此之外,這套「行人辨識系統」也搭配車頭下方的毫米波電達、以及車頂與車車頭兩側的雷射雷達(LiDAR)測距感測器,由系統將感測資訊共同彙整,提升行人辨識系統的穩定程度,更可將技術應用於「盲點警示系統」與「全周影像系統」,以辨識駕駛者側向盲區與車輛行駛之四周環境,是否有危害行車障礙物存在,預先作出適當的提醒與防護。

而雖然筆者在現場有觀察到,這套國人開發的「行人辨識系統」,遇到體型較為嬌小、穿著白色衣物的媒體同業時,有略為誤判而輕微撞上的情況。但整體多次的體驗當中,以 Luxgen U7 SUV 為基礎的自動駕駛實車,大多能在碰撞到兒童假人或實際的行人前完整煞停,系統的辨識與煞停機制仍算相當完備。

四、停車場域自動輔助駕駛系統
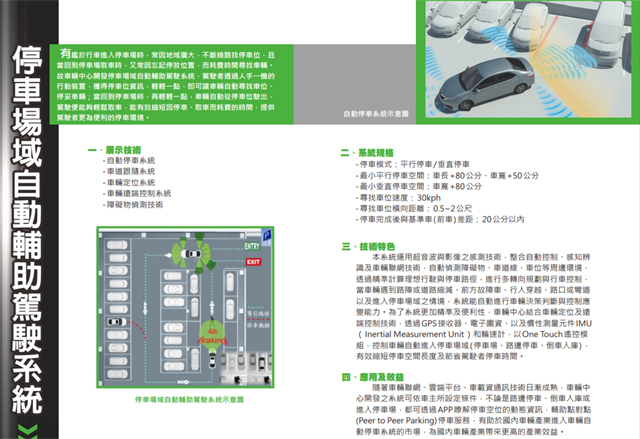
至於相同場域同時呈現的「停車場域自動輔助駕駛系統」,ARTC 則是同樣運用毫米波電達、雷射雷達(LiDAR)測距感測器,還有影像感測並整合自動控制、感知辨識及車輛聯網技術,再藉由自動停車系統、車道跟隨系統、車輛定位系統、車輛遠端控制系統、障礙物偵測技術等六項技術共同協作。讓駕駛者可以透過行動裝置、掌握停車為資訊之餘,也可輕易用點按的方式,讓車輛自動尋找車位停妥,或是遠端輕輕一按、將車輛從停車位中自動駛出,,整體停車、取車的過程更為便利。
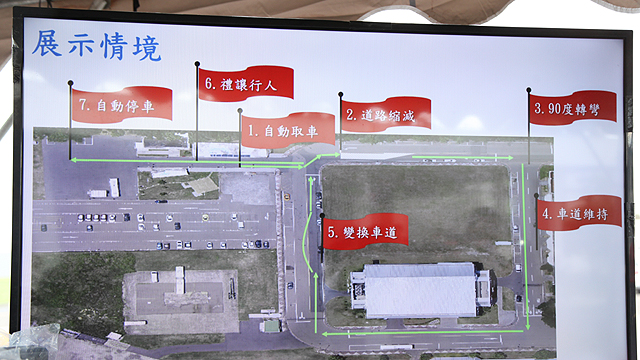
當天 ARTC 工作人員更讓筆者在現場實際體驗系統的運作,因此只見筆者按下手機中的 Start 按鈕後,自動駕駛實車便在「無人」的情況下,從筆者視線遠端的停車位中駛出,並且自動調整方向盤、油門後,精準的在筆者眼前停妥。

筆者跟隨 ARTC 工作人員指示上車之後,車輛在低速前行的過程中,有賴於雷射雷達(LiDAR)與 GPS 定位等其他系統的協作,因此碰到第一關「道路縮減」的路況,便會自行轉向閃避;緊接著,當車輛遇到需要進行 90 度轉彎的十字路口,車輛也會遵照駕駛的設定與路況進行轉向。

轉向至較長的直線車道時,中控上方螢幕便從原本轉彎時的「失效狀態」,轉變為呈現車道跟隨指示線,告知駕駛 LFS 車道跟隨系統已重新介入,幫助車輛維持在兩側標線之中直線行駛;而在完成兩次的 90 度轉向、直線車道後,ARTC 也在回到原場域的車道中央,停放一輛障礙車,只見自動駕駛實車,利用障礙物偵測技術等系統成功左偏閃避後,便自動將車輛駛回原本的車道上,整體系統介入的過程感受相當自然。


而回到原本的停車場域前,「停車場域自動輔助駕駛系統」除了會辨識行人進行煞停,也會自動尋找空位,既使無人在車上或駕駛沒有操作的情況下,系統也會自動排入倒檔、掌控油門與方向盤,讓車輛以倒車入庫的方式停妥於車位之中。

據 ARTC 人員指出,「停車場域自動輔助駕駛系統」主要是先利用車頭與車頂的雷射雷達(LiDAR)偵測障礙物;而前檔玻璃內的影像系統則占次要,用於辨識車道線與移動物體;最後,當前面兩項系統規劃的路徑有所誤判時,GPS 定位系統也會幫助車輛拉回圖資中正確的路徑,呈現三大系統共同互補的協作機能。

五、無線充電系統及車載網路管理
至於最後一項 ARTC 科研成果「無線充電系統及車載網路管理」,雖然礙於行程緊湊,筆者無法實際進行瞭解。但由於近年來智慧型手機、甚至是純電車輛無線充電系統市場的需求與日俱增,而車輛高功率的充電環境又較 3C 產品複雜,經常引發安全疑慮,ARTC 便針對此方面的趨勢,推出具備安全保護機能、國人研發的無線充電系統,以及彙整車輛資訊的車載網路管理系統。

因此,ARTC 所開發的車用無線充電系統(Wireless Charging System,WCS),便加入金屬異物偵測(Foreign Object Detection,FOD)技術,能即時判斷金屬異物入侵與否,有效中斷無線電力傳輸,並將相關訊息發送至客戶端,避免導電產生安全問題,以提升系統安全性。

此外在車載網路管理系統方面,也整合了多項技術,包含整車網路系統、整車控制、電能管理、異物偵測,有效即時反應充電異常狀態,並以「網路診斷」及「網路管理」溝通整車系統,強化系統的智慧管理及安全性。

ADAS 技術將持續優化,MIT「自駕車」願景需待共同合作實踐
ARTC 指出,未來將替各式 ADAS 技術將持續精進與優化,待國內相關法令核准後,搭載部份系統的半自動駕駛、甚至擁有完整功能的自動駕駛車或無人車,將有機會走入你我的生活當中。而筆者在一整天的 ARTC 五大科研成果體驗後,實地見識到國人也掌握「自動駕駛」、「無人車」等相關趨勢的研發能力,在測試驗證的設備上,亦具備與歐盟相同的規格水準,可說與國際各大車廠、研究機構擁有相同的立足點。

但誠如 ARTC 自身指出,技術上有持續精進與優化的空間,而相關技術的實踐,也有待國內法令核准,因此關鍵技術的授權與商轉,需要國內車廠、產官學的配套共同合作,再加上消費者的觀念亦要逐漸改變,才能讓「自動駕駛車」世界的願景,早日於國內實現。




討論區
成為第一個發表的人